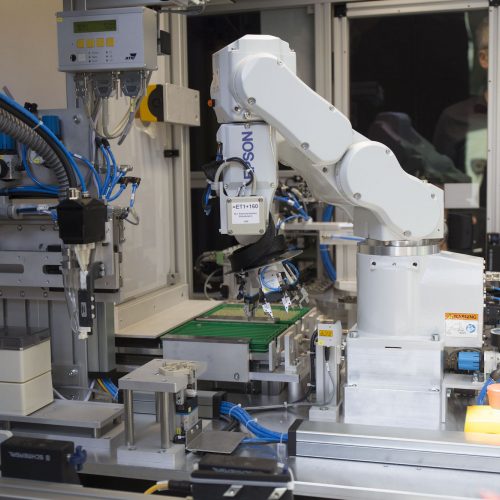
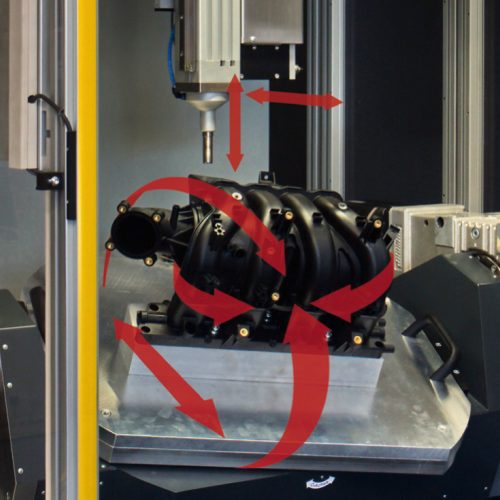
Flexible robot cells are very well suited for complex assembly processes. Different types of parts, a wide range of variants and freely programmable positions for processing and material provision are the strengths of robot applications. Scarar robots can be used for very fast assembly and placement processes, while articulated arm robots have advantages if the workpiece is to be processed in different positions in the work area.


contact sales
